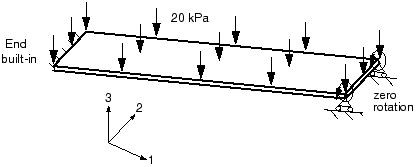
This example is a continuation of the linear skew plate simulation described in Chapter 5, “Using Shell Elements,” and shown in Figure 8–11.
You will now reanalyze the plate in Abaqus/Standard to include the effects of geometric nonlinearity. The results from this analysis will allow you to determine the importance of geometrically nonlinear effects and, therefore, the validity of the linear analysis.You only need to modify the history data to convert this model from a linear simulation to a nonlinear simulation.
If you wish, you can follow the guidelines at the end of this example to extend the simulation to perform a dynamic analysis using Abaqus/Explicit.
The steps that follow assumes that you have access to the full input file for this example. This input file, skew_nl.inp, is available in “Nonlinear skew plate,” Section A.6. Instructions on how to fetch and run the script are given in Appendix A, “Example Files.” If you wish to create the entire model using Abaqus/CAE, please refer to “Example: nonlinear skew plate,” Section 8.4 of Getting Started with Abaqus: Interactive Edition.
This example does not change any model data in the original skew plate example; only history data changes are included.
Applying NLGEOM to the step
Set the NLGEOM parameter equal to YES on the *STEP option, and remove the PERTURBATION parameter. This indicates that the analysis now includes nonlinear geometric effects. The default maximum number of increments is 100; Abaqus may use fewer increments than this upper limit, but it will stop the analysis if it needs more.
The modified *STEP option looks like:
*STEP, NLGEOM=YES
You may also wish to modify the description of the step to reflect that this is now a nonlinear analysis.
Defining the step time
This analysis requires a data line to the *STATIC option that specifies the size of the initial time increment, ![]() , for the analysis and the total step time for the simulation. A total step time of 1.0 is used, and
, for the analysis and the total step time for the simulation. A total step time of 1.0 is used, and ![]() is specified such that Abaqus applies 10% of the load in the first increment. The completed *STATIC option block will, therefore, be
is specified such that Abaqus applies 10% of the load in the first increment. The completed *STATIC option block will, therefore, be
*STATIC 0.1, 1.0
Output control
In a linear analysis Abaqus solves the equilibrium equations once and calculates the results for this one solution. A nonlinear analysis can produce much more output because results can be requested at the end of each converged increment. If you do not select the output requests carefully, the output files become very large, potentially filling the disk space on your computer.
As noted earlier, output is available in four different files:
the output database (.odb) file, which contains data in a neutral binary format necessary to postprocess the results with Abaqus/Viewer;
the data (.dat) file, which contains printed tables of selected results;
the restart (.res) file, which is used to continue the analysis; and
the results (.fil) file, which is used with third-party postprocessors.
Only the options for the output database (.odb) and printed output (.dat) files are discussed here. If selected carefully, data can be saved frequently during the simulation without using excessive disk space.
Remove the existing output requests from your input file; and add the following output options, which ensure that only selected output is saved during the nonlinear analysis.
To reduce the size of the output database file, the FREQUENCY parameter is used on the *OUTPUT, FIELD option; in this simulation field output is written every second increment. Thus, the FREQUENCY parameter is set to 2 on the *OUTPUT option:
*OUTPUT, FIELD, FREQUENCY=2, VARIABLE=PRESELECTThe parameter VARIABLE=PRESELECT indicates that a preselected set of the most commonly used field variables for a given type of analysis will be written to the output database (.odb) file. If you are simply interested in the final results, set the FREQUENCY parameter equal to a large number. Results are always stored at the end of each step, regardless of the value of the FREQUENCY parameter; therefore, using a large value causes only the final results to be saved.
Request that the displacements of the nodes at the midspan be saved to the output database file. These results will be used later to demonstrate the X–Y plotting capability in Abaqus/Viewer. Use the default FREQUENCY value (FREQUENCY=1) for this history output request for the output database file. Here the *NODE OUTPUT option must appear immediately after the history output request. Remember to use the NSET or ELSET parameters when limiting the output being requested to a subset of the model; otherwise, the default subset, which is the entire model, will be used.
Finally, request that reaction forces (RF) be printed for all the nodes in the model and that the displacements (U) be printed for the nodes at the midspan (node set MIDSPAN). You will need two *NODE PRINT options because you are requesting results for two different subsets of the model. Again, use the FREQUENCY parameter to reduce the amount of output; print the data every second increment.
The new list of output request option blocks looks like:
*OUTPUT, FIELD, FREQUENCY=2, VARIABLE=PRESELECT *OUTPUT, HISTORY, FREQUENCY=1 *NODE OUTPUT, NSET=MIDSPAN U, *NODE PRINT, NSET=MIDSPAN, FREQUENCY=2 U, *NODE PRINT, SUMMARY=NO, TOTALS=YES, FREQUENCY=2 RF,Finally, the step definition is completed using the *END STEP option.
*END STEP
Store the modified input in a file called skew_nl.inp (an example input file is listed in “Nonlinear skew plate,” Section A.6). Run the analysis using the following command:
abaqus job=skew_nl interactive
During a nonlinear analysis, two additional output files become very important. They are the status file (skew_nl.sta) and the message file (skew_nl.msg). As the analysis progresses, Abaqus will write data to both of these files. You can view the data even as Abaqus continues your analysis. You will need to learn how to use the data in these files to assess Abaqus's progress on your simulations. There may be situations where you decide, based on information in these files, to terminate your analysis early. A more likely scenario is that you may need to use these files to learn what caused Abaqus to terminate your analysis prematurely; i.e., what caused the convergence problems.
Status file
The status file is particularly useful for monitoring the progress of a nonlinear simulation while the job is running. The output below shows the status file for this nonlinear skewed plate example.
SUMMARY OF JOB INFORMATION:
STEP INC ATT SEVERE EQUIL TOTAL TOTAL STEP INC OF DOF IF
DISCON ITERS ITERS TIME/ TIME/LPF TIME/LPF MONITOR RIKS
ITERS FREQ
1 1 1 0 4 4 0.100 0.100 0.1000
1 2 1 0 2 2 0.200 0.200 0.1000
1 3 1 0 2 2 0.350 0.350 0.1500
1 4 1 0 2 2 0.575 0.575 0.2250
1 5 1 0 3 3 0.913 0.913 0.3375
1 6 1 0 2 2 1.00 1.00 0.08750
The status file contains a separate line for every converged increment in the simulation. The first column shows the step number—in this case there is only one step. The second column gives the increment number. The sixth column shows the number of iterations Abaqus needed to obtain a converged solution in each increment; for example, Abaqus needed 4 iterations in increment 1. The eighth column shows the total step time completed, and the ninth column shows the increment size (This example shows how Abaqus automatically controls the increment size and, therefore, the proportion of load applied in each increment. In this analysis Abaqus applied 10% of the total load in the first increment: you specified ![]() to be 0.1 and the step time to be 1.0. Abaqus needed four iterations to converge to a solution in the first increment. Abaqus only needed two iterations in the second increment, so it automatically increased the size of the next increment by 50% to
to be 0.1 and the step time to be 1.0. Abaqus needed four iterations to converge to a solution in the first increment. Abaqus only needed two iterations in the second increment, so it automatically increased the size of the next increment by 50% to ![]() = 0.15. Abaqus also increased
= 0.15. Abaqus also increased ![]() in both the fourth and fifth increments. It adjusted the final increment size to be just enough to complete the analysis; in this case the final increment size was 0.0875.
in both the fourth and fifth increments. It adjusted the final increment size to be just enough to complete the analysis; in this case the final increment size was 0.0875.
Message file
The message file contains more detailed information about the progress of the analysis than the status file. Abaqus lists all of the tolerances and parameters to control the analysis at the start of each step in the message file, as shown below. This is done for each step because these controls can be modified from step to step. The default values of these controls are appropriate for most analyses, so normally it is not necessary for you to modify them. The modification of control tolerances and parameters is beyond the scope of this guide (it is discussed in “Commonly used control parameters,” Section 7.2.2 of the Abaqus Analysis User's Guide).
S T E P 1 S T A T I C A N A L Y S I S
Uniform pressure (20.0 kPa) load
AUTOMATIC TIME CONTROL WITH -
A SUGGESTED INITIAL TIME INCREMENT OF 0.100
AND A TOTAL TIME PERIOD OF 1.00
THE MINIMUM TIME INCREMENT ALLOWED IS 1.000E-05
THE MAXIMUM TIME INCREMENT ALLOWED IS 1.00
LINEAR EQUATION SOLVER TYPE DIRECT SPARSE
CONVERGENCE TOLERANCE PARAMETERS FOR FORCE
CRITERION FOR RESIDUAL FORCE FOR A NONLINEAR PROBLEM 5.000E-03
CRITERION FOR DISP. CORRECTION IN A NONLINEAR PROBLEM 1.000E-02
INITIAL VALUE OF TIME AVERAGE FORCE 1.000E-02
AVERAGE FORCE IS TIME AVERAGE FORCE
ALTERNATE CRIT. FOR RESIDUAL FORCE FOR A NONLINEAR PROBLEM 2.000E-02
CRITERION FOR ZERO FORCE RELATIVE TO TIME AVRG. FORCE 1.000E-05
CRITERION FOR RESIDUAL FORCE WHEN THERE IS ZERO FLUX 1.000E-05
CRITERION FOR DISP. CORRECTION WHEN THERE IS ZERO FLUX 1.000E-03
CRITERION FOR RESIDUAL FORCE FOR A LINEAR INCREMENT 1.000E-08
FIELD CONVERSION RATIO 1.00
CRITERION FOR ZERO FORCE REL. TO TIME AVRG. MAX. FORCE 1.000E-05
CRITERION FOR ZERO DISP. RELATIVE TO CHARACTERISTIC LENGTH 1.000E-08
CONVERGENCE TOLERANCE PARAMETERS FOR MOMENT
CRITERION FOR RESIDUAL MOMENT FOR A NONLINEAR PROBLEM 5.000E-03
CRITERION FOR ROTATION CORRECTION IN A NONLINEAR PROBLEM 1.000E-02
INITIAL VALUE OF TIME AVERAGE MOMENT 1.000E-02
AVERAGE MOMENT IS TIME AVERAGE MOMENT
ALTERNATE CRIT. FOR RESIDUAL MOMENT FOR A NONLINEAR PROBLEM 2.000E-02
CRITERION FOR ZERO MOMENT RELATIVE TO TIME AVRG. MOMENT 1.000E-05
CRITERION FOR RESIDUAL MOMENT WHEN THERE IS ZERO FLUX 1.000E-05
CRITERION FOR ROTATION CORRECTION WHEN THERE IS ZERO FLUX 1.000E-03
CRITERION FOR RESIDUAL MOMENT FOR A LINEAR INCREMENT 1.000E-08
FIELD CONVERSION RATIO 1.00
CRITERION FOR ZERO MOMENT REL. TO TIME AVRG. MAX. MOMENT 1.000E-05
VOLUMETRIC STRAIN COMPATIBILITY TOLERANCE FOR HYBRID SOLIDS 1.000E-05
AXIAL STRAIN COMPATIBILITY TOLERANCE FOR HYBRID BEAMS 1.000E-05
TRANS. SHEAR STRAIN COMPATIBILITY TOLERANCE FOR HYBRID BEAMS 1.000E-05
SOFT CONTACT CONSTRAINT COMPATIBILITY TOLERANCE FOR P>P0 5.000E-03
SOFT CONTACT CONSTRAINT COMPATIBILITY TOLERANCE FOR P=0.0 0.100
DISPLACEMENT COMPATIBILITY TOLERANCE FOR DCOUP ELEMENTS 1.000E-05
ROTATION COMPATIBILITY TOLERANCE FOR DCOUP ELEMENTS 1.000E-05
EQUILIBRIUM WILL BE CHECKED FOR SEVERE DISCONTINUITY ITERATIONS
TIME INCREMENTATION CONTROL PARAMETERS:
FIRST EQUILIBRIUM ITERATION FOR CONSECUTIVE DIVERGENCE CHECK 4
EQUILIBRIUM ITERATION AT WHICH LOG. CONVERGENCE RATE CHECK BEGINS 8
EQUILIBRIUM ITERATION AFTER WHICH ALTERNATE RESIDUAL IS USED 9
MAXIMUM EQUILIBRIUM ITERATIONS ALLOWED 16
EQUILIBRIUM ITERATION COUNT FOR CUT-BACK IN NEXT INCREMENT 10
MAXIMUM EQUILIB. ITERS IN TWO INCREMENTS FOR TIME INCREMENT INCREASE 4
MAXIMUM ITERATIONS FOR SEVERE DISCONTINUITIES 50
MAXIMUM CUT-BACKS ALLOWED IN AN INCREMENT 5
MAXIMUM DISCON. ITERS IN TWO INCREMENTS FOR TIME INCREMENT INCREASE 50
MAXIMUM CONTACT AUGMENTATIONS FOR *SURFACE BEHAVIOR,AUGMENTED LAGRANGE 6
CUT-BACK FACTOR AFTER DIVERGENCE 0.2500
CUT-BACK FACTOR FOR TOO SLOW CONVERGENCE 0.5000
CUT-BACK FACTOR AFTER TOO MANY EQUILIBRIUM ITERATIONS 0.7500
CUT-BACK FACTOR AFTER TOO MANY SEVERE DISCONTINUITY ITERATIONS 0.2500
CUT-BACK FACTOR AFTER PROBLEMS IN ELEMENT ASSEMBLY 0.2500
INCREASE FACTOR AFTER TWO INCREMENTS THAT CONVERGE QUICKLY 1.500
MAX. TIME INCREMENT INCREASE FACTOR ALLOWED 1.500
MAX. TIME INCREMENT INCREASE FACTOR ALLOWED (DYNAMICS) 1.250
MAX. TIME INCREMENT INCREASE FACTOR ALLOWED (DIFFUSION) 2.000
MINIMUM TIME INCREMENT RATIO FOR EXTRAPOLATION TO OCCUR 0.1000
MAX. RATIO OF TIME INCREMENT TO STABILITY LIMIT 1.000
FRACTION OF STABILITY LIMIT FOR NEW TIME INCREMENT 0.9500
TIME INCREMENT INCREASE FACTOR BEFORE A TIME POINT 1.000
GLOBAL STABILIZATION CONTROL IS NOT USED
PRINT OF INCREMENT NUMBER, TIME, ETC., EVERY 1 INCREMENTS
Abaqus lists a summary of each iteration in the message file after the lists of tolerances and controls. It prints the values of the largest residual force, ![]() ; largest increment of displacement,
; largest increment of displacement, ![]() ; the largest correction to displacement,
; the largest correction to displacement, ![]() ; and the time averaged force,
; and the time averaged force, ![]() . It also prints the nodes and degrees of freedom (DOF) at which
. It also prints the nodes and degrees of freedom (DOF) at which ![]() ,
, ![]() , and
, and ![]() occur. A similar summary is printed for rotational degrees of freedom.
occur. A similar summary is printed for rotational degrees of freedom.
INCREMENT 1 STARTS. ATTEMPT NUMBER 1, TIME INCREMENT 0.100
CONVERGENCE CHECKS FOR EQUILIBRIUM ITERATION 1
AVERAGE FORCE 12.2 TIME AVG. FORCE 12.2
LARGEST RESIDUAL FORCE -749. AT NODE 1051 DOF 1
LARGEST INCREMENT OF DISP. -5.576E-03 AT NODE 559 DOF 3
LARGEST CORRECTION TO DISP. -5.576E-03 AT NODE 559 DOF 3
FORCE EQUILIBRIUM NOT ACHIEVED WITHIN TOLERANCE.
AVERAGE MOMENT 1.12 TIME AVG. MOMENT 1.12
LARGEST RESIDUAL MOMENT -3.273E-03 AT NODE 1104 DOF 5
LARGEST INCREMENT OF ROTATION 1.598E-02 AT NODE 159 DOF 5
LARGEST CORRECTION TO ROTATION 1.598E-02 AT NODE 159 DOF 5
ROTATION CORRECTION TOO LARGE COMPARED TO ROTATION INCREMENT
In this example the initial time increment is 0.1, as specified in the input file. The average force for the increment is 12.2 N, and ![]() has the same value since this is the first increment. The largest residual force in the model,
has the same value since this is the first increment. The largest residual force in the model, ![]() , is 749 N, which is clearly greater than 0.005 ×
, is 749 N, which is clearly greater than 0.005 × ![]() .
. ![]() occurred at node 1051 in degree of freedom 1. Abaqus must also check for equilibrium of the moments in the model since this model includes shell elements. The moment/rotation field also failed to satisfy the equilibrium check.
occurred at node 1051 in degree of freedom 1. Abaqus must also check for equilibrium of the moments in the model since this model includes shell elements. The moment/rotation field also failed to satisfy the equilibrium check.
Although failure to satisfy the equilibrium check is enough to cause Abaqus to try another iteration, you should also examine the displacement correction. In the first iteration of the first increment of the first step the largest increment of displacement, ![]() , and the largest correction to displacement,
, and the largest correction to displacement, ![]() , are both 5.576 × 103 m; and the largest increment of rotation and correction to rotation are both 1.598 × 102 radians. Since the incremental values and the corrections are always equal in the first iteration of the first increment of the first step, the check that the largest corrections to nodal variables are less than 1% of the largest incremental values will always fail. However, if Abaqus judges the solution to be linear (a judgement based on the magnitude of the residuals,
, are both 5.576 × 103 m; and the largest increment of rotation and correction to rotation are both 1.598 × 102 radians. Since the incremental values and the corrections are always equal in the first iteration of the first increment of the first step, the check that the largest corrections to nodal variables are less than 1% of the largest incremental values will always fail. However, if Abaqus judges the solution to be linear (a judgement based on the magnitude of the residuals, ![]() < 108
< 108![]() ), it will ignore this criterion.
), it will ignore this criterion.
Since Abaqus did not find an equilibrium solution in the first iteration, it tries a second iteration, as shown below.
CONVERGENCE CHECKS FOR EQUILIBRIUM ITERATION 2
AVERAGE FORCE 1.00 TIME AVG. FORCE 1.00
LARGEST RESIDUAL FORCE -0.173 AT NODE 1051 DOF 1
LARGEST INCREMENT OF DISP. -5.582E-03 AT NODE 651 DOF 3
LARGEST CORRECTION TO DISP. -7.050E-05 AT NODE 1201 DOF 1
FORCE EQUILIBRIUM NOT ACHIEVED WITHIN TOLERANCE.
AVERAGE MOMENT 1.12 TIME AVG. MOMENT 1.12
LARGEST RESIDUAL MOMENT -8.698E-04 AT NODE 208 DOF 5
LARGEST INCREMENT OF ROTATION -1.597E-02 AT NODE 1051 DOF 5
LARGEST CORRECTION TO ROTATION 1.305E-04 AT NODE 409 DOF 4
THE MOMENT EQUILIBRIUM EQUATIONS HAVE CONVERGED
In the second iteration ![]() has fallen to 0.173 N at node 1051 in degree of freedom 1. However, equilibrium is not satisfied in this iteration because 0.005
has fallen to 0.173 N at node 1051 in degree of freedom 1. However, equilibrium is not satisfied in this iteration because 0.005 ![]() , where
, where ![]() = 1.00 N, is still less than
= 1.00 N, is still less than ![]() . The displacement correction criterion also failed again because
. The displacement correction criterion also failed again because ![]() = 7.050 × 105, which occurred at node 1201 in degree of freedom 1, is more than 1% of
= 7.050 × 105, which occurred at node 1201 in degree of freedom 1, is more than 1% of ![]() = 5.582 × 103, the maximum displacement increment.
= 5.582 × 103, the maximum displacement increment.
Both the moment residual check and the largest correction to rotation check were satisfied in this second iteration; however, Abaqus must perform two more iterations because the solutions did not pass the force residual check (or the largest correction to displacement criterion). The message file summaries for the additional iterations necessary to obtain a solution in the first increment are shown below.
CONVERGENCE CHECKS FOR EQUILIBRIUM ITERATION 3
AVERAGE FORCE 0.997 TIME AVG. FORCE 0.997
LARGEST RESIDUAL FORCE -5.838E-03 AT NODE 459 DOF 2
LARGEST INCREMENT OF DISP. -5.582E-03 AT NODE 651 DOF 3
LARGEST CORRECTION TO DISP. 9.150E-06 AT NODE 559 DOF 3
FORCE EQUILIBRIUM NOT ACHIEVED WITHIN TOLERANCE.
AVERAGE MOMENT 1.12 TIME AVG. MOMENT 1.12
LARGEST RESIDUAL MOMENT -1.338E-06 AT NODE 908 DOF 5
LARGEST INCREMENT OF ROTATION -1.597E-02 AT NODE 1051 DOF 5
LARGEST CORRECTION TO ROTATION 3.233E-05 AT NODE 809 DOF 5
THE MOMENT EQUILIBRIUM EQUATIONS HAVE CONVERGED
CONVERGENCE CHECKS FOR EQUILIBRIUM ITERATION 4
AVERAGE FORCE 0.997 TIME AVG. FORCE 0.997
LARGEST RESIDUAL FORCE -1.581E-07 AT NODE 1002 DOF 1
LARGEST INCREMENT OF DISP. -5.582E-03 AT NODE 651 DOF 3
LARGEST CORRECTION TO DISP. 1.945E-09 AT NODE 559 DOF 3
THE FORCE EQUILIBRIUM EQUATIONS HAVE CONVERGED
AVERAGE MOMENT 1.12 TIME AVG. MOMENT 1.12
LARGEST RESIDUAL MOMENT 3.691E-10 AT NODE 259 DOF 5
LARGEST INCREMENT OF ROTATION -1.597E-02 AT NODE 1051 DOF 5
LARGEST CORRECTION TO ROTATION 6.461E-09 AT NODE 809 DOF 5
THE MOMENT EQUILIBRIUM EQUATIONS HAVE CONVERGED
ITERATION SUMMARY FOR THE INCREMENT: 4 TOTAL ITERATIONS, OF WHICH
0 ARE SEVERE DISCONTINUITY ITERATIONS AND 4 ARE EQUILIBRIUM ITERATIONS.
TIME INCREMENT COMPLETED 0.100 , FRACTION OF STEP COMPLETED 0.100
STEP TIME COMPLETED 0.100 , TOTAL TIME COMPLETED 0.100
After four iterations ![]() = 0.997 N and
= 0.997 N and ![]() = 1.581 × 107 N at node 1002 in degree of freedom 1. These values satisfy
= 1.581 × 107 N at node 1002 in degree of freedom 1. These values satisfy ![]() < 0.005 ×
< 0.005 × ![]() , so the force residual check is satisfied. Comparing
, so the force residual check is satisfied. Comparing ![]() to the largest increment of displacement shows that the displacement correction is below the required tolerance. The solution for the forces and displacements has, therefore, converged. The checks for both the moment residual and the rotation correction continue to be satisfied, as they have been since the second iteration. With a solution that satisfies equilibrium for all variables (displacement and rotation in this case), the first load increment is complete. The increment summary shows the number of iterations that were required for this increment, the size of the increment, and the fraction of the step that has been completed.
to the largest increment of displacement shows that the displacement correction is below the required tolerance. The solution for the forces and displacements has, therefore, converged. The checks for both the moment residual and the rotation correction continue to be satisfied, as they have been since the second iteration. With a solution that satisfies equilibrium for all variables (displacement and rotation in this case), the first load increment is complete. The increment summary shows the number of iterations that were required for this increment, the size of the increment, and the fraction of the step that has been completed.
The second increment requires two iterations to converge, as shown below.
INCREMENT 2 STARTS. ATTEMPT NUMBER 1, TIME INCREMENT 0.100
CONVERGENCE CHECKS FOR EQUILIBRIUM ITERATION 1
AVERAGE FORCE 10.2 TIME AVG. FORCE 6.33
LARGEST RESIDUAL FORCE -4.11 AT NODE 459 DOF 2
LARGEST INCREMENT OF DISP. -5.585E-03 AT NODE 651 DOF 3
LARGEST CORRECTION TO DISP. 1.846E-04 AT NODE 509 DOF 3
FORCE EQUILIBRIUM NOT ACHIEVED WITHIN TOLERANCE.
AVERAGE MOMENT 2.27 TIME AVG. MOMENT 1.70
LARGEST RESIDUAL MOMENT -1.226E-02 AT NODE 208 DOF 4
LARGEST INCREMENT OF ROTATION -1.586E-02 AT NODE 1051 DOF 4
LARGEST CORRECTION TO ROTATION -7.332E-04 AT NODE 409 DOF 5
MOMENT EQUILIBRIUM NOT ACHIEVED WITHIN TOLERANCE.
CONVERGENCE CHECKS FOR EQUILIBRIUM ITERATION 2
AVERAGE FORCE 10.2 TIME AVG. FORCE 6.33
LARGEST RESIDUAL FORCE -5.316E-04 AT NODE 359 DOF 2
LARGEST INCREMENT OF DISP. -5.587E-03 AT NODE 651 DOF 3
LARGEST CORRECTION TO DISP. -2.954E-06 AT NODE 459 DOF 3
THE FORCE EQUILIBRIUM EQUATIONS HAVE CONVERGED
AVERAGE MOMENT 2.67 TIME AVG. MOMENT 1.90
LARGEST RESIDUAL MOMENT 4.569E-07 AT NODE 208 DOF 4
LARGEST INCREMENT OF ROTATION -1.586E-02 AT NODE 1051 DOF 4
LARGEST CORRECTION TO ROTATION 1.028E-05 AT NODE 209 DOF 4
THE MOMENT EQUILIBRIUM EQUATIONS HAVE CONVERGED
TIME INCREMENT MAY NOW INCREASE TO 0.150
ITERATION SUMMARY FOR THE INCREMENT: 2 TOTAL ITERATIONS, OF WHICH
0 ARE SEVERE DISCONTINUITY ITERATIONS AND 2 ARE EQUILIBRIUM ITERATIONS.
TIME INCREMENT COMPLETED 0.100 , FRACTION OF STEP COMPLETED 0.200
STEP TIME COMPLETED 0.200 , TOTAL TIME COMPLETED 0.200
Abaqus continues this process of applying an increment of load then iterating to find a solution until it completes the whole analysis (or reaches the increment specified as the value of the INC parameter). In this analysis it required four more increments. Abaqus gives a summary at the end of the message file of how the analysis progressed and how many error and warning messages it issued. The summary for this analysis is shown below. An important item to check is how many iterations Abaqus uses. In this analysis it performed 15 iterations over the six increments: the model's system of equations was solved 15 times (i.e., 15 matrix decompositions), illustrating the increased computational expense of nonlinear analyses compared with linear simulations.
THE ANALYSIS HAS BEEN COMPLETED
ANALYSIS SUMMARY:
TOTAL OF 6 INCREMENTS
0 CUTBACKS IN AUTOMATIC INCREMENTATION
15 ITERATIONS INCLUDING CONTACT ITERATIONS IF PRESENT
15 PASSES THROUGH THE EQUATION SOLVER OF WHICH
15 INVOLVE MATRIX DECOMPOSITION, INCLUDING
0 DECOMPOSITION(S) OF THE MASS MATRIX
1 REORDERING OF EQUATIONS TO MINIMIZE WAVEFRONT
0 ADDITIONAL RESIDUAL EVALUATIONS FOR LINE SEARCHES
0 ADDITIONAL OPERATOR EVALUATIONS FOR LINE SEARCHES
1 WARNING MESSAGES DURING USER INPUT PROCESSING
0 WARNING MESSAGES DURING ANALYSIS
0 ANALYSIS WARNINGS ARE NUMERICAL PROBLEM MESSAGES
0 ANALYSIS WARNINGS ARE NEGATIVE EIGENVALUE MESSAGES
0 ERROR MESSAGES
JOB TIME SUMMARY
USER TIME (SEC) = 0.50000
SYSTEM TIME (SEC) = 0.0000
TOTAL CPU TIME (SEC) = 0.50000
WALLCLOCK TIME (SEC) = 2
You should always check this summary at the end of every Abaqus simulation. It tells you if the analysis job ran to completion (i.e., whether it terminated without a FORTRAN error), and it gives the number of error and warning messages Abaqus issued during the simulation. Always investigate any errors or warnings. All warnings and errors generated during the analysis are found in the message (.msg) file. Warnings issued “during user input processing” are found in the data (.dat) file.
Data file
The tables of displacements and reaction forces that you requested are in the data (.dat) file. The midspan deflections at the end of the step can be found near the end of the file.
THE FOLLOWING TABLE IS PRINTED FOR NODES BELONGING TO NODE SET MIDSPAN
NODE FOOT- U1 U2 U3 UR1 UR2 UR3
NOTE
601 -1.2795E-04 -4.4921E-05 -1.0831E-02
602 -1.2457E-04 -4.5147E-05 -1.0749E-02
603 -1.2218E-04 -4.5645E-05 -1.0679E-02
604 -1.2070E-04 -4.5966E-05 -1.0625E-02
605 -1.1891E-04 -4.6602E-05 -1.0581E-02
606 -1.1749E-04 -4.6822E-05 -1.0553E-02
607 -1.1489E-04 -4.7487E-05 -1.0537E-02
608 -1.1213E-04 -4.7541E-05 -1.0541E-02
609 -1.0685E-04 -4.8026E-05 -1.0561E-02
MAXIMUM -1.0685E-04 -4.4921E-05 -1.0537E-02 0.000 0.000 0.000
AT NODE 609 601 607 0 0 0
MINIMUM -1.2795E-04 -4.8026E-05 -1.0831E-02 0.000 0.000 0.000
AT NODE 601 609 601 0 0 0
Compare these with the displacements from the linear analysis in Chapter 5, “Using Shell Elements.” The maximum displacement at the midspan in this simulation is about 9% less than that predicted from the linear analysis. Including the nonlinear geometric effects in the simulation reduces the vertical deflection (U3) of the midspan of the plate.
Another difference between the two analyses is that in the nonlinear simulation there are nonzero deflections in the 1- and 2-directions. What effects make the in-plane displacements, U1 and U2, nonzero in the nonlinear analysis? Why is the vertical deflection of the plate less in the nonlinear analysis?
The plate deforms into a curved shape: a geometry change that is taken into account in the nonlinear simulation. As a consequence, membrane effects cause some of the load to be carried by membrane action rather than by bending alone. This makes the plate stiffer. In addition, the pressure loading, which is always normal to the plate's surface, starts to have a component in the 1- and 2-directions as the plate deforms. The nonlinear analysis includes the effects of this stiffening and the changing direction of the pressure. Neither of these effects is included in the linear simulation.
The differences between the linear and nonlinear simulations are sufficiently large to indicate that a linear simulation is not adequate for this plate under this particular loading condition.
For five degree of freedom shells, such as the S8R5 element used in this analysis, Abaqus does not output total rotations at the nodes.
When you are in the directory containing the output database file skew_nl.odb, type the following command at the operating system prompt:
abaqus viewer odb=skew_nl
Showing the available frames
To begin this exercise, determine the available output frames (the increment intervals at which results were written to the output database).
To show the available frames:
From the main menu bar, select Result![]() Step/Frame.
Step/Frame.
The Step/Frame dialog box appears.
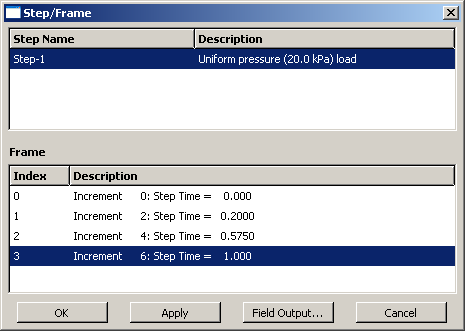
During the analysis Abaqus/Standard wrote field output results to the output database file every second increment, as was requested. Abaqus/Viewer displays the list of the available frames, as shown in Figure 8–12.
The list tabulates the steps and increments for which field variables are stored. This analysis consisted of a single step with six increments. The results for increment 0 (the initial state of the step) are saved by default, and you saved data for increments 2, 4, and 6. By default, Abaqus/Viewer always uses the data for the last available increment saved in the output database file.
Click OK to dismiss the Step/Frame dialog box.
Displaying the deformed and undeformed model shapes
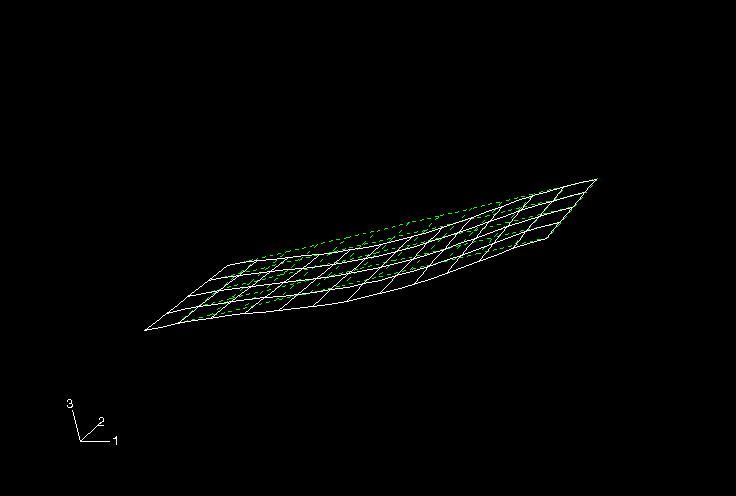
Use the Allow Multiple Plot States ![]() tool to display the deformed model shape with the undeformed model shape superimposed. Set the render style for both images to wireframe, and toggle off the translucency of the superimposed plot from the Superimpose Plot Options dialog box. Rotate the view to obtain a plot similar to that shown in Figure 8–13. By default, the deformed shape is plotted for the last increment. (For clarity, the edges of the undeformed shape are plotted using a dashed style.)
tool to display the deformed model shape with the undeformed model shape superimposed. Set the render style for both images to wireframe, and toggle off the translucency of the superimposed plot from the Superimpose Plot Options dialog box. Rotate the view to obtain a plot similar to that shown in Figure 8–13. By default, the deformed shape is plotted for the last increment. (For clarity, the edges of the undeformed shape are plotted using a dashed style.)
Using results from other frames
You can evaluate the results from other increments saved to the output database file by selecting the appropriate frame.
To select a new frame:
From the main menu bar, select Result![]() Step/Frame.
Step/Frame.
The Step/Frame dialog box appears.
Select Increment 4 from the Frame menu.
Click OK to apply your changes and to close the Step/Frame dialog box.
Any plots now requested will use results from increment 4. Repeat this procedure, substituting the increment number of interest, to move through the output database file.
Note: Alternatively, you may use the Frame Selector dialog box to select a results frame.
X–Y plotting
You saved the displacements of the midspan nodes (node set MIDSPAN) in the history portion of the output database file skew_nl.odb for each increment of the simulation. You can use these results to create X–Y plots. In particular, you will plot the vertical displacement history of the nodes located at the edges of the plate midspan.
To create X–Y plots of the midspan displacements:
First, display only the nodes in the node set named PART-1–1.MIDSPAN: in the Results Tree, expand the Node Sets container underneath the output database file named skew_nl.odb. Click mouse button 3 on the set named PART-1-1.MIDSPAN, and select Replace from the menu that appears.
Use the Common Plot Options dialog box to show the node labels (i.e., numbers) to determine which nodes are located at the edges of the plate midspan.
In the Results Tree, expand the History Output container for the output database named skew_nl.odb.
Locate the output labeled as follows: Spatial displacement: U3 at Node xxx in NSET MIDSPAN. Each of these curves represents the vertical motion of one of the midspan nodes.
Tip: Filter the container according to *U3* to facilitate your selection.
Select (using [Ctrl]+Click) the vertical motion of the two midspan edge nodes. Use the node labels to determine which curves you need to select.
Click mouse button 3, and select Plot from the menu that appears.
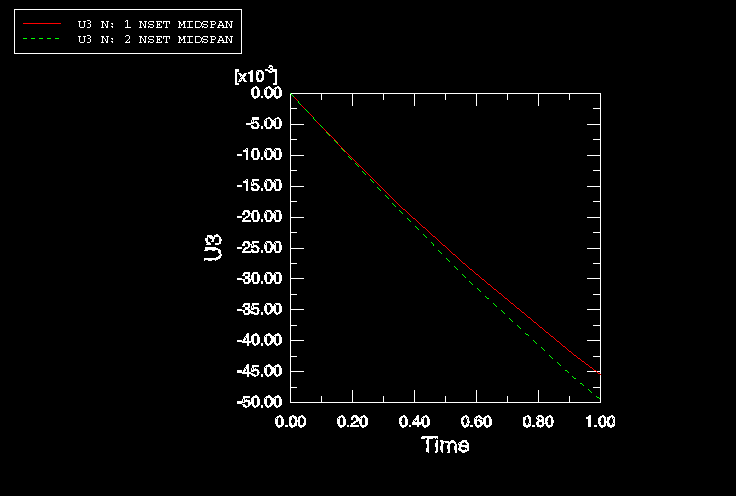
Abaqus reads the data for both curves from the output database file and plots a graph similar to the one shown in Figure 8–14. (For clarity, the second curve has been changed to a dashed line, and the default grid and legend positions have been changed.)
The nonlinear nature of this simulation is clearly seen in these curves: as the analysis progresses, the plate stiffens. In this simulation the increase in the plate stiffness with the deformation is due to membrane effects. Therefore, the resulting peak displacement is less than that predicted by the linear analysis, which did not include this effect.
You can create X–Y curves from either history or field data stored in the output database (.odb) file. X–Y curves can also be read from an external file or they can be typed into the Visualization module interactively. Once curves have been created, their data can be further manipulated and plotted to the screen in graphical form.
The X–Y plotting capability of Abaqus/Viewer is discussed further in Chapter 10, “Materials.”
Tabular data
Create a tabular data report of the midspan displacements. Use the node set PART-1–1.MIDSPAN to create the appropriate display group and the frame selector to choose the final frame. The contents of the report are shown below.
Source 1
---------
ODB: skew_nl.odb
Step: Step-1
Frame: Increment 6: Step Time = 1.000
Loc 1 : Nodal values from source 1
Output sorted by column "Node Label".
Field Output reported at nodes for part: PART-1-1
Node U.U1 U.U2 U.U3
Label @Loc 1 @Loc 1 @Loc 1
-----------------------------------------------------------------
601 -2.68589E-03 -746.369E-06 -49.4577E-03
602 -2.62498E-03 -749.228E-06 -48.9958E-03
603 -2.57304E-03 -758.277E-06 -48.5853E-03
604 -2.53788E-03 -761.475E-06 -48.1742E-03
605 -2.48991E-03 -774.13E-06 -47.6904E-03
606 -2.45666E-03 -777.171E-06 -47.1307E-03
607 -2.40294E-03 -792.3E-06 -46.52E-03
608 -2.36145E-03 -793.014E-06 -45.9489E-03
609 -2.27792E-03 -805.258E-06 -45.4701E-03
Minimum -2.68589E-03 -805.258E-06 -49.4577E-03
At Node 601 609 601
Maximum -2.27792E-03 -746.369E-06 -45.4701E-03
At Node 609 601 609
As an optional exercise, you can modify the model and run a dynamic analysis of the skew plate in Abaqus/Explicit. To do so, you must add a density of 7800 kg/m3 to the material definition and change the element type to S4R (with appropriate modifications to the element connectivity list). After making the appropriate model changes, you can create and run a new job to examine the transient dynamic effects in the plate under a suddenly applied load.